Page 1 sur 2
Parce qu'on en est fiers (ou pas)
Posté : jeu. 12 mai 2016 10:36
par vague nerd
Parce qu'on est content -ou pas- d'avoir passer des heurs, des jours, des mois voir des années à mettre au point le plus beau -ou le plus moche- robot du monde,
Parce que ce bel automate, assemblé avec amour à l'authentique titane de scotch, ou l'élastique de Tungstène, voir carrément en authentique brique... en plastique colorées,
Parce que c'est notre enfant préféré -ou pas-, Parce qu'on c'est quand même bien amusé et qu'on a appris plein de chose en le mettant au point,
Parce on en est fier et qu'on à le droit de taper son vice (son "ceu-vi" même, oui je suis vieux et j'assume),
je propose ce thread pour que chacun puisse y déposer des photos de ces créations à base de nos framboises si goutteuses,
(bon aller, on est pas raciste, à base de nano carte axées bidouilles).
Je me propose même de les compiler dans les premiers post, (après obtention de votre accord bien entendu), nos belles réalisations !
Qu'en pensez-vous ?
Re: Parce qu'on en est fiers (ou pas)
Posté : jeu. 12 mai 2016 10:39
par vague nerd
Aller, je me lance : voici mes première réalisation à base de pi.
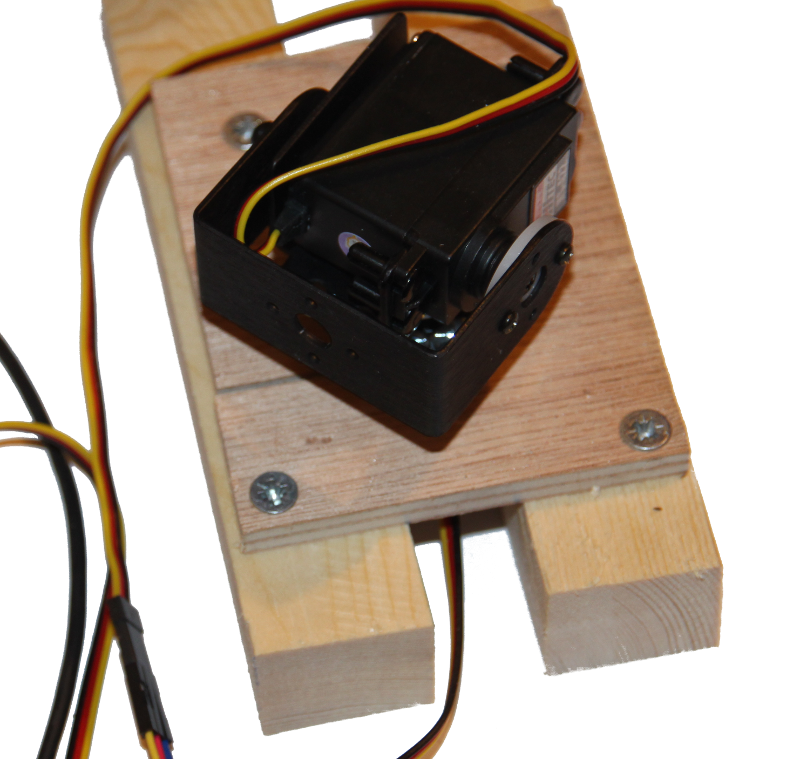
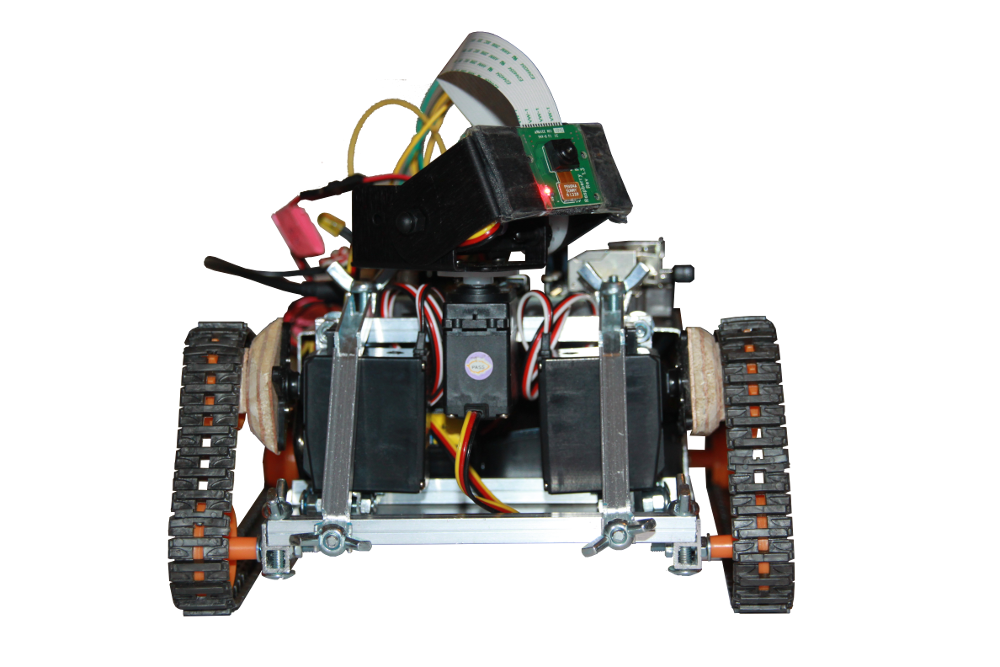
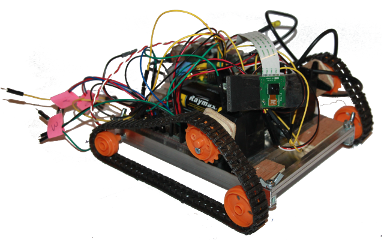
Le premier robot (3eme photo), roulette, est animé par un pi B pas plus, 2 servos à rotation continue, et 2 servos standard pour la tourelle de la cam.
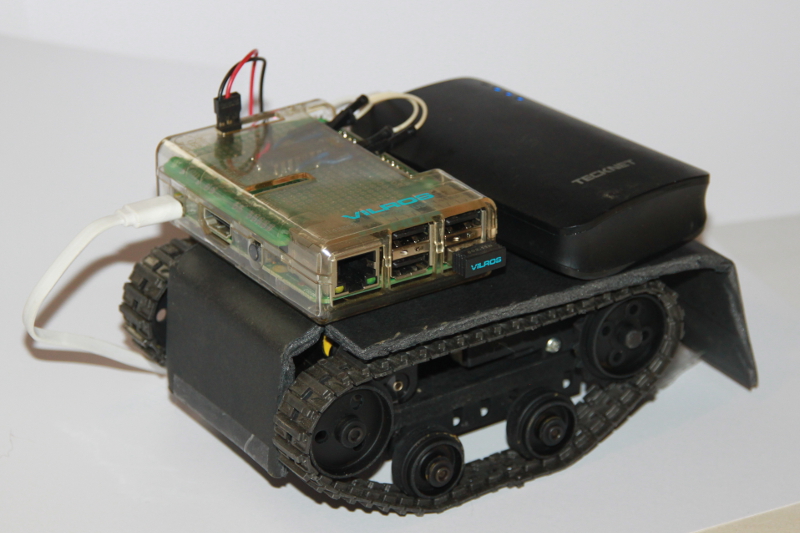
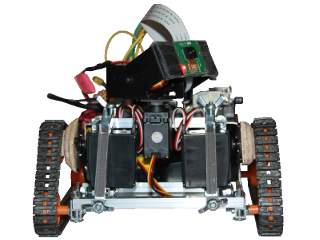
Le second (4eme photo, ici encore au stade proto) est maintenant animé par un pi A+, un pont en H type sn754410, et deux vrais moteurs.

Re: Parce qu'on en est fiers (ou pas)
Posté : jeu. 12 mai 2016 10:58
par vague nerd
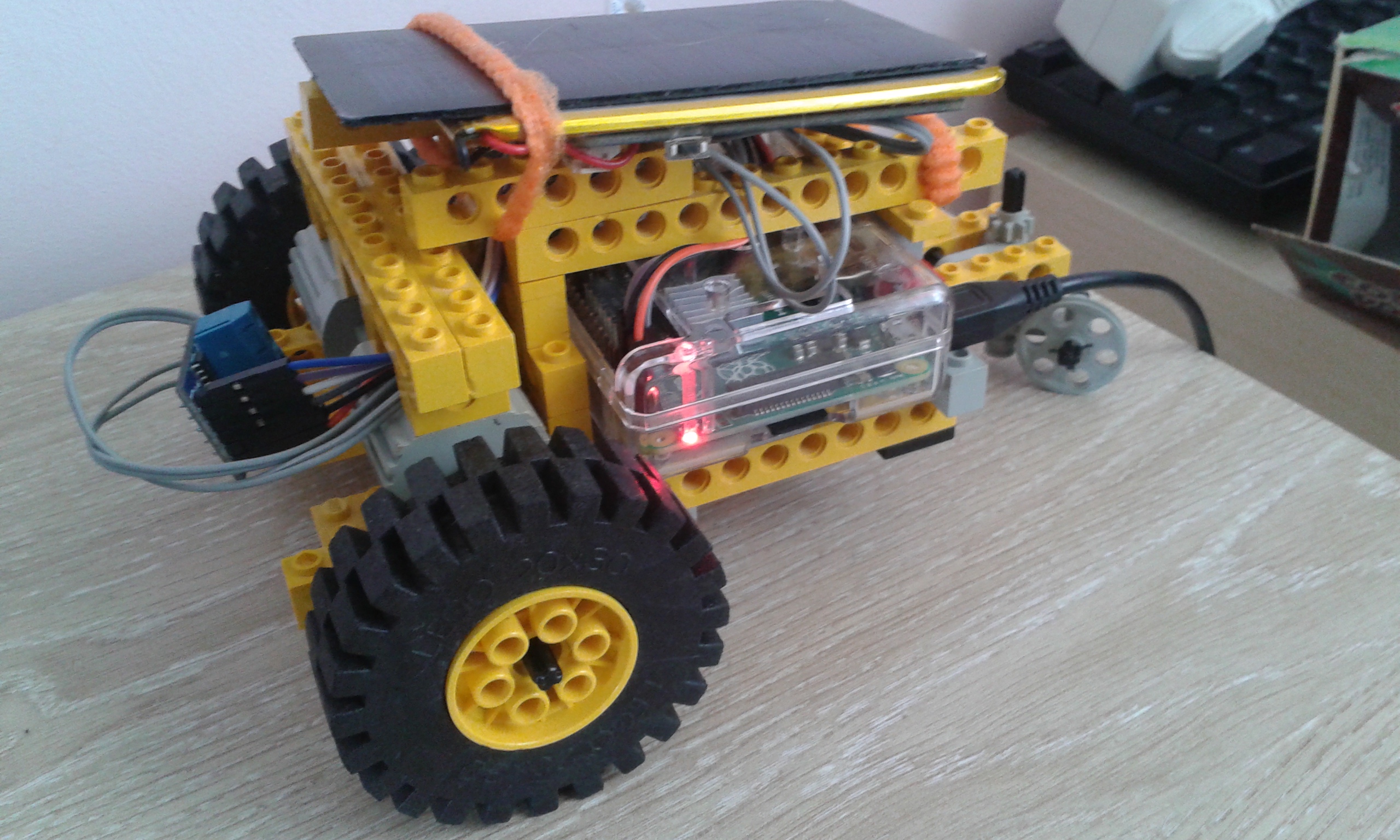
Un raspberry pi, un contrôleur de moteur L9110S et deux moteur dc, pour cette réalisation de guillaume9344.
Il est contrôlé par un wiimote à l'aide de la librairie
WiiC, le programme C avec code::blocks compilé sur le pi, est téléchargeable
ici.

Re: Parce qu'on en est fiers (ou pas)
Posté : jeu. 12 mai 2016 10:59
par vague nerd
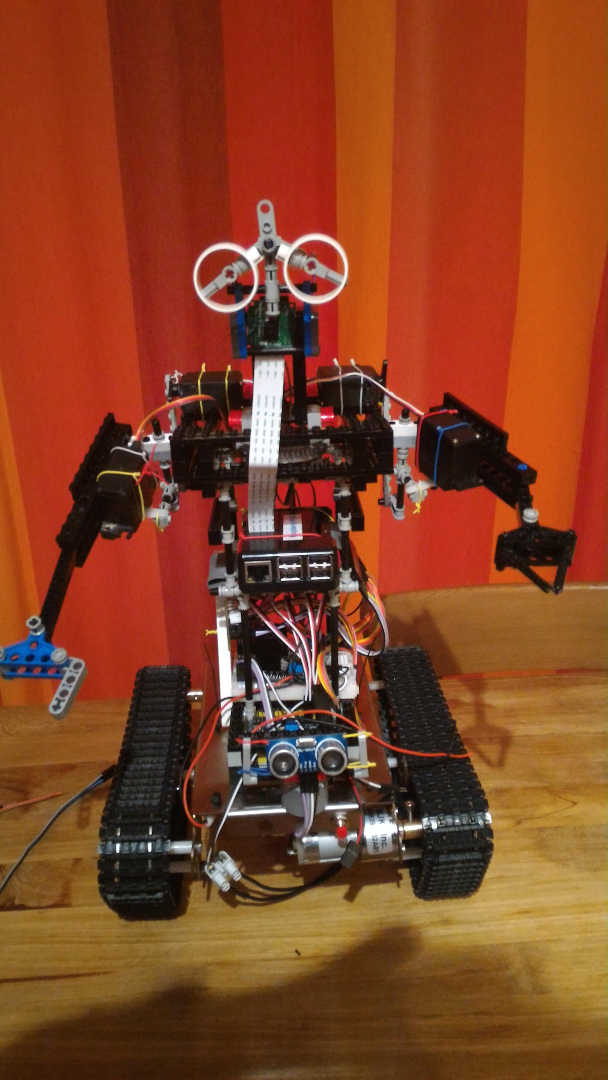
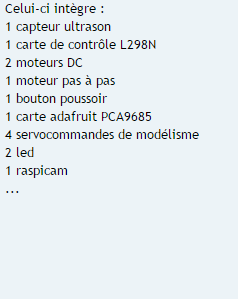
Voici un superbe prototype de Bat, piloté en wifi via un joypad, qui se déplace de manière autonome, parle (espeak), bouge les bras, ...
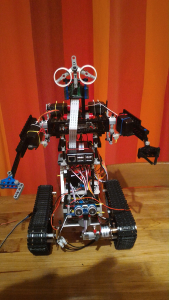
Plus d'information sur son évolution
ici.
Re: Parce qu'on en est fiers (ou pas)
Posté : jeu. 12 mai 2016 10:59
par vague nerd
Réservé
Re: Parce qu'on en est fiers (ou pas)
Posté : jeu. 12 mai 2016 13:05
par guillaume9344
@+
Re: Parce qu'on en est fiers (ou pas)
Posté : ven. 13 mai 2016 06:48
par vague nerd
Salut guillaume9344.
Merci pour votre contrib. Vous voulez bien nous donner quelques infos sur votre robot ?
C'est à base d'arduino, si je ne m'abuse...
Cdt.
Re: Parce qu'on en est fiers (ou pas)
Posté : ven. 13 mai 2016 07:27
par guillaume9344
Arduino.......

ha non pas de ca chez moi

non rigole j 'ai un atemega qui commande mon imprimente 3d.
Non il n 'y a pas d'autre controleur qu' une raspberry. c'est rover qui est commandé par une wimote (manette de console de jeu nintendo) , j'utilise un driver de moteur L9110S pour un moteur pas a pas ou ici deux moteur dc.
J ai également équipé la pi d'une clé bluetooth pour la communication avec la telecommande.
le programme 'ci-joint) est ecrit en C avec code::blocks , le tout compilé sur la pi .
@+
Re: Parce qu'on en est fiers (ou pas)
Posté : ven. 13 mai 2016 12:51
par vague nerd
Et vous avez une photo de rover ? Faudrait pas qu'il se vexe !
Re: Parce qu'on en est fiers (ou pas)
Posté : ven. 13 mai 2016 18:39
par guillaume9344
guillaume9344 a écrit :. c'est rover qui est commandé par une wimote
grosse erreure de frappe de ma part , lire : "c'est un rover" (donc c'est bien la photo cidessus).
J'ai également oublié de citer l'utilisation de la bibliothéque WIIC
https://github.com/grandelli/WiiC pour etre exostif sur mes sources.
@+