Voici donc le proto :
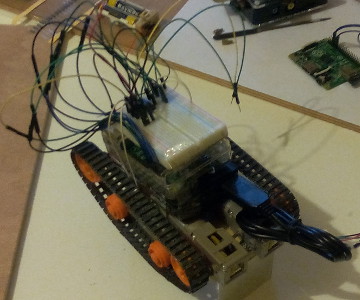
Y'a plus qu'a allumer !
Modérateur : Francois

Code : Tout sélectionner
sudo ./servod --p1pins="7,13" --min=0us --max=20000us
echo 0=30% > /dev/servoblaster
echo 1=30% > /dev/servoblaster
echo 0=0% > /dev/servoblaster
echo 1=0% > /dev/servoblasterguillaume9344 a écrit :A quand les premier tour de roues sur mars
Je plusoie ! Te moque pas, il passe les câbles d'alim sans encombres !bon sur un bureau et franchir des buches en crayons , des canyons avec des livres, c'est souvent les plus grandes des victoires
Oui, je m'en servirai si j'ai recours à des piles au passage "en prod" (Pour en revenir sur le booster(je sais je suis lourd) votre booster est prévu pour être alimenté par une tension "basse" de 3v à 4.5v et convertir cette tension "variable" en une tension fixe de 5v qui est équivalente à ce que sort votre batterie (en réalité la batterie est constituée d'un accu et d'un convertisseur boost pour pouvoir sortir du "5v usb" indépendamment des variation de tension de l 'accu) .

Je l'ai deja fait pour des essais, sans probleme.vague nerd a écrit : Par contre, petite question : puis-je alimenter le pi par le GPIO +5V, tout en consommant sur le +3.3V (toujours un problème de place) ?