En revanche, faut que je m'occupe de cette histoire de led, lol, je m'y suis pas mis encore.
Merci
Modérateur : Francois

Et puis de ton micro servo. Aucune différence de contrôle avec normal ou un gros.En revanche, faut que je m'occupe de cette histoire de led, lol, je m'y suis pas mis encore.
Np.Merci
Si c'est chez le même fournisseur tu risques de payer les droits de douane, sinon sur plusieurs fournisseurs tu payes aliexpress et chaque fournisseur envoie directement.Oliver17 a écrit :@ VagueNerd : je suis taré, j'ai commandé pour plus de 150 € de matos en Chine, je croise les doigts pour que tout arrive. :/
Ah oui, j'ai tout pris sur Aliexpress ...
Tu as pu tester alors ? Ca peut être très intéressant...http://www.algodoo.com/
Et c'est gratuit maintenant, faut que je test
Edit : Zut cela reste de la 2D, donc pas d'import de bracket lynxmotion. snif
Dommage, mais cela reste sympa tout de même pour le reste ^^
Oui c'est clair tu a raison, mais ça m'amuse un peu, là j'utilise V-rep qui est un logiciel http://www.coppeliarobotics.com/index.html j'ai importer les brackets de lynxmotion, j'aimerais trouver des servomoteurs taille standard au format .3ds pour faire un assemblage, déjà juste ça cela peut donner une idée de la structure.vague nerd a écrit :Joue avec ton servo : tu aura des résultats immédiats !
Cdt.
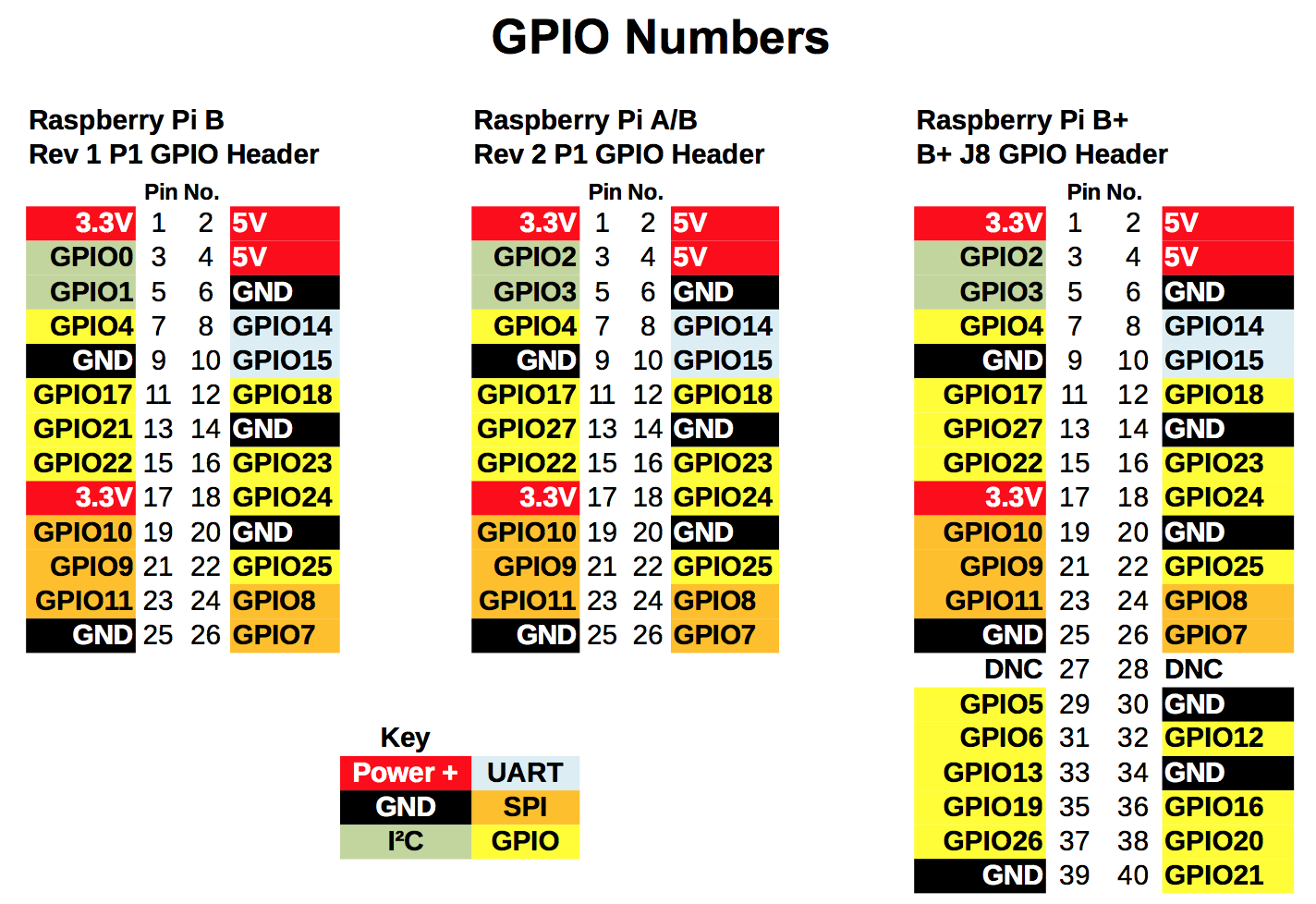
Non, il n'y a pas de port analogique sur le pi. C'est pour ça que je te parlai (je ne sais plus où) de module externe à brancher sur le bus i2c.en revanche j'ai pas trouvé analog,
Il n'y en a qu'un. Par contre, tu peux émuler du pwm sur n'importe quel pin numérique du GPIO (comme le fait servoblaster).et si j'ai bien compris il y a peu de pwm sur le pi 3. ?
Qu'est-ce qui n'est pas clair ou suffisamment détaillé à ton gout ?